In this lesson we introduce a new concept, dilatation, which is
an example of a transformation of the Euclidean plane to itself
that takes points
to point and lines to lines, and has additional, useful properties.
Dilatations simplify classical Euclidean proofs and they are an
introduction to the fourth and final part of the course where we
discover and classify all Euclidean isometries in the plane.
In this lesson we will also pay close attention to the method of proof
we apply in any given situation. We begin with Court’s proof of the
existence and properties of the Euler line. This proof is in the
classical style of Euclid himself, in that it uses the Side-Angle-Side
(SAS) theorem for similar triangles you learned in high school.
Then we introduce dilatations but we do not study them systematically
and exhaustively (see Tondeur, Ch. 2) because this would distract us
from the purpose of this lesson.
We then give a second proof of the same theorem concerning Euler’s
line, using dilatation. Finally, we prove a much more complicated
theorem about a circle that connects 9 interesting points of any
triangle, again using dilatations.
Recall how we proved the concurrency of the medians of a triangle using vector methods earlier
in the course. The trick was to rewrite the barycenter, $ G=\frac{A+B+C}{3} $ of
a triangle $ \triangle ABC $ in three different ways, beginning with
$ G = \frac{1}{3}A + \frac{2}{3}(\frac{B+C}{2}) $ and cycling the three letters.
Recall from the Main Collinearity Lemma (MCL), this expresses $ G $
as a point $ \frac{2}{3} $ of the way down the cevian from vertex $ A $ to
the midpoint of the opposite side. Cycling the labels puts $ G $ on each of the
three medians, hence they must intersect. (We even say that the medians of a triangle
trisect each other to remind you of this proof.)
Question 1.
Give another proof directly from Ceva’s theorem.
Since the midpoints $ A', B', C' $ of the sides have the ratios
$ \frac{A'-B}{A'-C}= -1 $, etc., their product is $ -1 $. So
these cevians are concurrent.
The foregoing discussion used the vector methods we identified with
Cartesian geometry in the first part of the course. We next take a more
classical, Euclidean approach.
Perhaps you remember from high school that the perpendicular bisectors of the sides of
a triangle are also concurrent (as are the altitudes, and the angle bisectors.) We give a
different kind of proof for the first and the second concurrency, and skip the angle
bisectors.
-
For convenience, we will abbreviate the term "perpendicular bisector"
to perbis, and write $perbis(AB)$ for the perbis of the segment
between $ A, B $.
Since for Euclid, a circle is the locus
of points equidistant from its center, and the $perbis(AB) $ is the locus of
points equidistant from $ A \and B $, every circle through
`A` and `B` must have its center on
$ c := perbis(AB) $. We use a colon in front of an = sign when we
want to emphasize that the equation is a definition, not a deduction.
Let $ b=perbis(CA) \and a = perbis(BC) $. Then $ (cb) $ is the center of
a circle through $ A, B \and C $ and so lies on $ a $. In other words,
$ D := (abc) $ exists and is called the circumcenter because it is the
center of the circumcircle, $ \odot ABC $.
The point were the three altitudes of a triangle meet is called the orthocenter, and
usually denoted by the letter $ H $. There direct proofs that the orthocenter
exists. But we shall derive this fact from the properties of $ G \and D $ using,
first, a purely Euclidean proof due to Court, and then another proof using dilatations.
In the process we identify $ H = 3G - 2D $.
Question 2.
How does this equation say that $ (HGD) $ and that $ G $ trisects the
segment $ HD $ ?
Since $ 3 + (-2) =1 $ the three points are collinear, and
$ \frac{H-G}{H-D}= \frac{2}{3} $
So then `b` and `c` intersect at the center of the circle
`D` through `C` and `A`, and through
`A` and `B`. This is the
circumcircle of the triangle. Since the circumcircle also passes through
`B` and `C`, its center is on the perbis
`a` of `BC`. So `a,b,c` are concurrent.
Exercise 1a.
Use KSEG to draw `G,H,D` of a triangle.
Show that the three points are collinear on the so-called Euler Line,
and discover the proportion of `H,G`, and `D` on the line.
What happens when the triangle becomes obtuse?
Exercise 1b.
Once you have two nice KSEG examples, one for an acute and the other for an obtuse
triangle, draw the three points and their line with your gnomon (transparent
30-60-90 triangle) and some strips of paper. The latter allow you to find midpoints
of the sides of the triangle, and the former lets you draw reasonably accurate
perbises.
Court’s Proof of the Euler Line theorem is a beautiful example of the classical methods of Euclidean Geometry. We use SAS for similar triangles in a very creative way to prove the following.
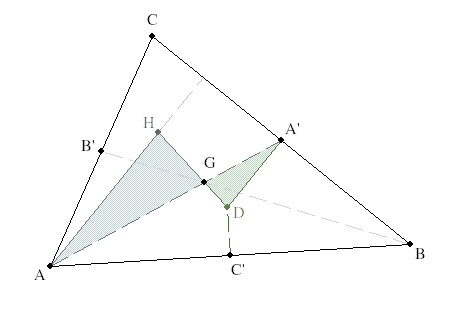
Proof (Court). Label the bisectors of the sides of a triangle `\triangle ABC`
by `A',B',C'` respectively. Choose a vertex.
Suppose your choice is `A`. Draw the triangle `\triangle A'DG`.
Recall from the Barycenter Theorem that `|AG|=2|GA'|`. So extend `DG`
by twice its length to a new point, call it `H`.
Notice that the two triangles are similar because the two opposite angles at `G`
are equal, of course. Both pairs of flanking sides are in the same ratio, 2:1. Therefore
triangle `\triangle AGH~~\triangle A'GD` (in that order). Thus the corresponding
angles `/_H` and `/_D` are equal. Therefore the sides
`A'D` || `AH`.
Since the former is by construction perpendicular to `BC`, so is `AH`
extended, which is just the altitude on `A` . Since your choice of `A`
was arbitrary, and `H` is constructed from `D` and `G`
independently of your choice, the other two altitudes must also go through `H`,
the orthocenter.
$\square$
Exercise 2a.
In KSEG, draw the altitudes to find `H` and the midpoints of the sides. Draw the perbices to find `D`, but hide the perbices. They do not figure in subsequent construction. Now find `N` the midpoint of `H` and `D`. Draw a circle `K` centered on `N` and through `A'`. What other points does `K` go through? Measure the points `A'',B'',C''` where `K` crosses the altitudes from `A` for second time! Identify the nine points on `K`. What happens when the triangle becomes obtuse?
Exercise 2b.
When you have found a nice view in KSEG, construct a nine-point circle picture in your journal with ruler and compass.
Exercise 2c.
Formulate the statement of the Nine-Point Circle, also known as the Feuerbach Circle. There are many interesting proofs of Feuerbach’s Circle Theorem, each illustrating different approaches to geometry. Because we are interested in developing a third approach to geometry, that of Felix Klein’s Erlanger Program, we will go directly to this method.
A function `f` that assigns to every point `P` in the plane, one and only one other point `f(P)` in the plane is called a point transformation. We are interested only in those transformations which are also one-to-one and onto.
We shall also use the notation `f:E rarr E:X|->f(X)` where the final `f(X)` says explicitly what `f` does to the typical point `X`. For example, consider the
For example, the command “move 10 miles to the east-north-east”
addressed to every spot on the earth is such a
translation.
Question 3.
What spot on earth is unable to obey this order?
At the poles there is no direction "east-north-east".
We need a flat earth for this
to be a valid trafo.
To see that `tau_A` is a trafo, we notice that it has
an inverse, `tau_A^{-1}=tau_{-A}` . The way you check this
identity is to apply it to an `X` and see if it is true
regardless of which `X` you chose.
From this it follows (see exercise) that a translation
is 1:1 and onto.
Since trafos are functions, they can be composed.
For example, $ \tau_A \circ \tau_B = \tau_{A+B} $
Thus the set of translations are closed under the operation of composition.
Note that the composition of a translation with its inverse is the
translation by the zero vector.
Thus `tau_0= iota`, the identity trafo which leaves every point
fixed where it is. Finally, functions compose in an associative
way, i.e. `(tau_A tau_B)tau_C=tau_A(tau_B tau_C)`.
Thus the set of translations is a group of trafos.
Question 4.
For a subset $ S $ of a group $ G $
to be itself a group, why is it
sufficient to check only two conditions:
-
Closure: $ (\forall \varphi, \psi \in S)(\varphi \psi \in S) $
-
Inverses: $ (\forall \varphi \in S)( \varphi^{-1} \in S) $
Associativity is inherited from $ G $. Combining the two conditions
shows that $ \varphi \varphi^{-1} = \iota \in S $. All four conditions for
being a group are met for the subset.
Comment.
The concept of a group is central to modern algebra. We do not wish to
study groups abstractly in this course. So we shall simplify our definition
to apply only to groups that are subgroups of the group of all point
transformations of the plane. Since associativity is inherited to each
subgroup we won’t bother to mention it again. Similarly, the identity
trafo, $ \iota : X |-> X $, which leaves every point fixed, is
also the identity for each subgroup. We will henceforth only worry about
closure under composition and taking inverses.
You have met many examples of groups in your math courses,
perhaps without
their being so identified. For instance, vectors in the plane form a
group under the operation of addition/subtraction. The zero-vector is
the identity. Similarly, the set of all non-zero real numbers is a group
under multiplication, with 1 the identity. In the next two exercises we
show how these two groups reappear among the point transformations of
the plane.
Exercise 3.
Check the two closure conditions for the set of
all translations to see that they form a subgroup of
point transformations of the plane.
A second fundamental property of vectors, after addition, is scalar
multiplication, and this is seen in the linear dilatations defined by the following
These transformations are called linear dilatations because they fix
the origin of the coordinate system currently in force in the plane. Calling
them "original dilations" would cause snickers.
Note that the identity is a linear dilatation because
$ \iota(X)= X = 1 X = \delta_1 (X)$, for all points.
Question 5.
What is the inverse of a linear dilatation? Is it also a linear dilatation?
We were careful to require the scaling factor $ r $ in the definition
of $ \delta_r $ to be non-zero. This way,
$ \delta_{\frac{1}{r}} $ is also a linear dilatation. Writing out
what their composition does to an arbitrary point:
$ \delta_r \delta_{\frac{1}{r}}(X) = r \frac{1}{r}(X) = X = \iota(X) $
we see that $ \delta_{\frac{1}{r}} = \delta_r^{-1} $
Exercise 4.
Show that the set `{\delta_r:r\ne 0}` of all linear
dilatations forms a group of trafos under composition. Recall that
you need to check only two properties.
The linear dilatations scale points relative to the origin of
`E`. In general, we want to scale relative to any center
of dilatation. Relative to an arbitrary point `Q` we
want to move every point `X` toward/away from
`Q` by the same ratio. We do this by scaling the displacement
of `X` from `Q` by the ratio `r` and
add it to `Q`.
The difference between a central dilatation and a linear one is the center
from which the stretching or shrinking is done. Thus a linear dilatation is
just the special case of a central dilatation for which $ Q $ is the
origin of the underlying coordinate
system, $ \delta_r = \delta_{O,r}$.
Notice the second expression defining the central dilatation
recalls our study of
barycentric coordinates.
The difference here is that `r` is a constant
for the central dilatation and `X` is a variable.
Another special case of a central dilatation, when the 'scaling
parameter `r=-1`,
is called a central reflection.
Comment.
It is unfortunate that central reflections are customarily written
with a $ \sigma $ instead of a $ \delta $ .
Just as we dropped the center when it is understood to be the origin
to obtain
a linear dilatation, $ \delta_r $, we might want to drop the
scaling factor $ r=1 $ to obtain a central reflection
$ \delta_Q = \sigma_Q $. The reason for this logical asymmetry
will become clear later when central reflections prove to be very
similar to yet another kind of trafo, reflections in lines.
Exercise 5.
Verify that `\sigma_Q\sigma_Q=\sigma_Q^2=\iota` and
conclude from this that the set
$ \{ \iota, \sigma_Q \} $ is a group of just two elements.
Therefore a central reflection is its own inverse.
A transformation which is its own inverse, i.e. its "square"
is the identity, is called an involution. Involutions play
an important role in algebra. Our first example of involutions
are the central reflections. Later we shall meet general reflections
in lines, which are even more important. Note that in the previous
exercise you proved that any involution with the identity forms a
two element group of transformations.
Whenever a class of transformations has an explicit definition in terms of
what a member does to every point, it is generally not difficult the
determine whether it is a group or not.
First, compose two of them and see that this yields another transformation
of the same species. That is, the composition can be written in the same
format that defines the class.
This property is called closure. Second, figure out how to
reverse the transformation and see that its inverse is still in the class.
To see that closure does not necessarily hold for sets of similarly
defined transformations, let us check closure for central reflections.
In particular, the composition `\sigma_P \sigma_Q` is not another
central reflection.
Exercise 6a.
Verify that `\sigma_P\sigma_Q(X)=X+2(P-Q)=\tau_{2(P-Q)}(X)`.
Exercise 6b.
Show that the identity is the only trafo which is both a central dilatation
and a translation. Hint: A trafo `f` is both a central dilatation `delta_{Q,r}` and a translation `tau_A`, if for any `X`,
`f(X)\ =\ tau_A(X)\ =\ delta_{Q,r}(X)`. |
Hint: Expand the second equality using definitions and
deduce that `f` must be the identity.
We shall next guess the inverse of a central dilatation
and prove that our guess is right:
`\delta_{P,s}\delta_{P,1//s}` = |
`\delta_{P,s}(P(1-\frac{1}{s})\ +\ \frac{1}{s}X)` |
= |
`P(1-s)\ +\ s(P(1-\frac{1}{s}))\ +\ \frac{1}{s}X` |
= |
`P-sP+sP-P+X` |
= |
`X`. |
Thus every central dilatation has an inverse,
and therefore, is 1:1 and onto. But we still don’t know when the
composition of two central dilatations does yield
another central dilatation, and not a translation as happened above.
Exercise 7a.
Follow the scheme above to find `R` and
`r` in terms of `P,p,Q`, and
`q` so that
`\delta_{R,r}=\delta_{P,p}\delta_{Q,q}`.
Also determine the exceptions. Hint: Apply the right hand side to `X` and obtain the intermediate result
`(P(1-p)+p(1-q)Q) + pqX)\ =\ R(1-r)+rX`. |
We can read off that `r=pq`, but note that we would have to multiply and divide the first expression by `(1-pq)`.
Exercise 7b.
Show that if `pq=1`, the product of the two central dilatations
is in fact a translation, and not a central dilatation at all.
Exercise 7c.
Show what happens when `p=q=-1`.
Exercise 7d.
If `1-pq!=0`, what geometrical relation does
`R` have to `P` and `Q`?
To see whether central dilatations have any uses we discover some of
their properties.
That is, the image `\ell^\delta` of a line is another line. In fact this transformed line is parallel to its original. And, if `K` is a circle through 3 points `A,B,C`, with center `D` and radius `d`, we write `\bigcirc(D,d)=\bigcirc(A,B,C)`. It is a surprising fact that
`K^\delta=\bigcirc(D^\delta,rd)=\bigcirc(A^\delta,B^\delta,C^\delta)`. |
Proof. There are many ways to write the equation of a line, but the only relevant one here is to use barycentric coordinates for a typical point on the line. Recall
`delta_{Q,r}(aA+bB)` = |
`Q+r(aA+bB-Q)` |
= |
`Q(a+b)+r(aA+bB-aQ-bQ)` |
= |
`a(Q + r(A-Q) + b(Q + r(B-Q))` |
= |
`aA^\delta +bB^\delta`. |
Exercise 8a.
Do the same calculation using the other expression `X^delta =(1-r)Q+rX`.
Exercise 8b.
`(aA + bB + cC)^\delta = aA^\delta + bB^\delta + cC^\delta`. |
What we have thus showed is that
`\delta_{Q,r}\ell_{AB}\ =\ \ell_{A^\delta B^\delta}`. |
This is the sense in which we use the term "preserves." A displacement vector `D` is just the difference between two points, `D=B-A`. It has the property that if `A` is displaced by `D` we come to `B`. Suppose we calculate
`B^\delta -A^\delta` = |
`(Q(1-r)+rA)-(Q(1-r)+rB)` |
= |
`r(B-A)`. |
Exercise 8c.
What have we just proved? Formulate it as a proposition. Be precise; give names to things you are talking about.
Finally, for a circle `Z` with center `K` and radius `k` we consider the typical point `X` on its circumference. We have just shown that
`X^\delta -K^\delta = r(X-K)`. |
So the image `Z^\delta` is the locus of points that are a distance `rk` from the point `K`. This is the desired circle.
We next cash in our efforts by showing how the properties of central dilatations we have discovered apply to these classic theorems.
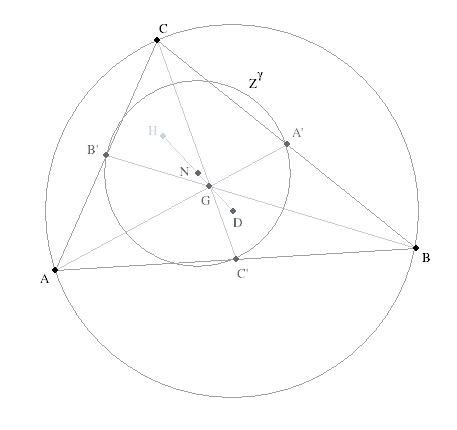
Consider the standard labeling of a triangle `\triangle ABC` with circumcenter `D` and barycenter `G`. Set `\gamma =\delta_{G,-1//2}`. Recall that `G` cuts the medians into the ratio of 2:1. This means that
`A^\gamma=A'` |
`B^\gamma=B'` |
`C^\gamma=C'`. |
Let `H:=delta_{G,-2} D`, then `H^gamma=D` (why?). Thus we get 3 pairs of parallel lines
`\ell_{AH}` || `\ell_{DA'}` |
`\ell_{BH}` || `\ell_{DB'}` |
`\ell_{CH}` || `\ell_{DC'}`. |
Since the each of the lines on the RHS is perpendicular to the corresponding sides of the triangle, the LHS must all be altitudes.
Exercise 9.
Show that we have thus proved that given the medians are concurrent at a point that trisects them, the altitudes are concurrent if and
only if the perpendicular side bisectors (perbices) are concurrent. Hint: Take `D` in the above argument to be just any point in the triangle, other than `G`, of course.
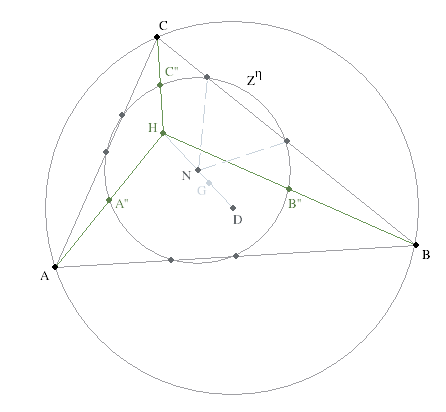
We now conclude by proving Feuerbach’s Theorem. Here we shall use two different central dilatations `gamma =\delta_{G,-1//2}` and `\eta =\delta_{H,1//2}`.
We have already proved that
`Z^\gamma :=(\text{circumcircle})^\gamma=\bigcirc(A,B,C)^\gamma =\bigcirc(A^\gamma ,B^\gamma ,C^\gamma)=\bigcirc(A',B',C')`. |
Where `Z^\gamma` has center `N:=D^\gamma` and radius `r=\frac{1}{2}\ xx\ \text{(circumradius)}`. Using some arithmetic concerning thirds of halves, it is immediate that the center `N` of this new circle `Z^gamma` is half way between `D` and `H`. Its radius is half of the circumradius. We already know 3 radii, we find six more.
|
Click image to view in KSEG. |
|
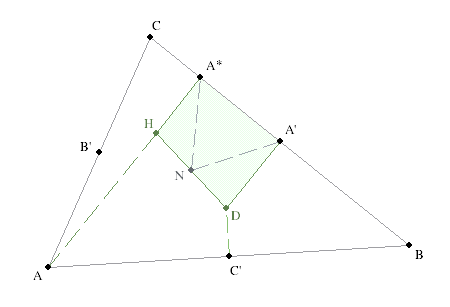
Let `A^{**}` be the foot of the altitude on `A`, etc. Since both `A^{**}H` and `A'D` are perpendicular to the base `BC`, and `N` is the midpoint of the top side of this rectangular trapezoid `A^{**}A'DH`, the distances `|A^{**}-N|=|A'-N|`. This is known as Euler’s trapezoid.
|
Click image to view in KSEG. |
|
Exercise 10.
Prove the lemma we have just used (state it!) by classical methods.
We now have six of the nine points on Feuerbach’s Circle.
|
Click image to view in KSEG. |
|
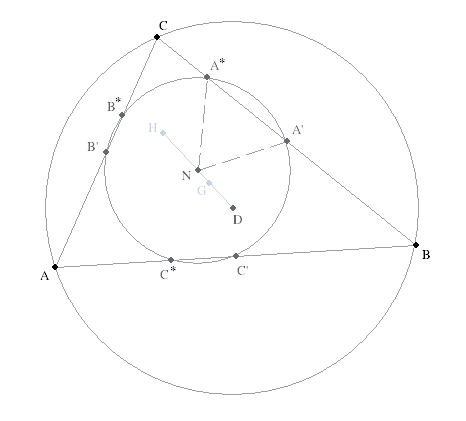
Suppose we label the midpoints `A''=\frac{A+H}{2}, B'', C''` of the “long” parts of the altitudes. Because the second dilatation `\eta` shrinks these segments in half, it is clear that `A'' = A^\eta`, etc. As before, we conclude that
`Z^\eta :=(\text{circumcircle})^\eta=\bigcirc(A,B,C)^\eta =\bigcirc(A^\eta ,B^\eta ,C^\eta)=\bigcirc(A',B',C')`. |
with center `N:=D^\eta` and radius `r=\frac{1}{2}\ xx\ \text{(circumradius)}`. Thus both circles `Z^\gamma ,Z^\eta` are centered at the same point `N` and have the same radius. Thus they must be the same circle, and Feuerbach’s circle really does go through all nine points.
|
Click image to view in KSEG. |
|