In virtually all the papers read, the lattice grid is viewed as a vector field. This is done for several reasons:
In NKS, for example, Wolfram uses a $96 \times 96$ subgrid to approximate a vector direction on a 6 million lattice grid. Previously in his 1987 paper, Wolfram used …. for a 4600(?) lattice grid.
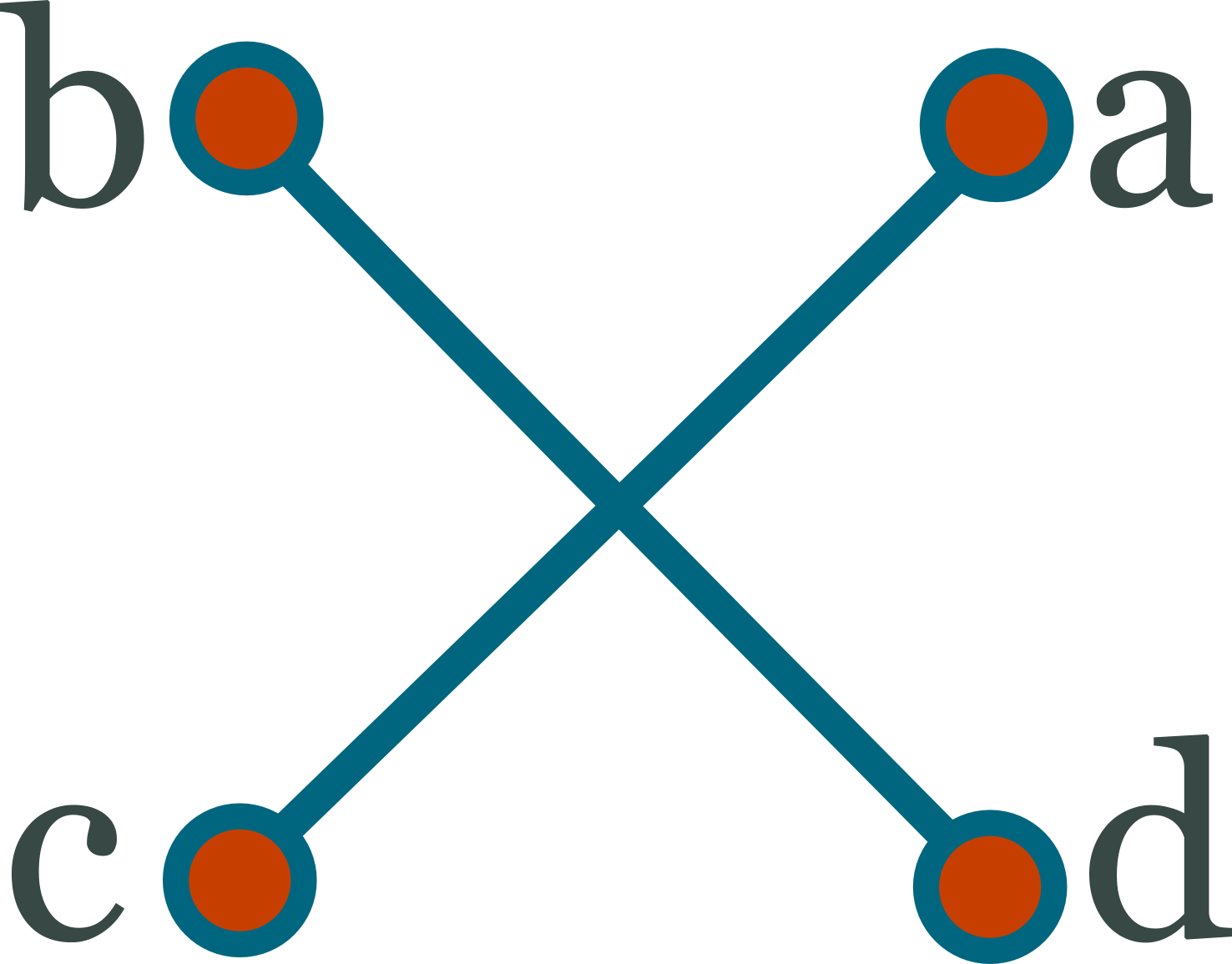
We represent each lattice with $4$ vectors, each containing is stored in its own matrix. This means that a[i][j] contains the a vector component of the lattice on the $i^{th}$ row and $j^{th}$ column. With this representation in place, we perform the following to compute the next frame.
a, b, c, and d matrices.Four temporary matrices are created and are called K_a, K_b, K_c, and K_d to signify which direction they correspond to. The vector K_a[i][j] is the updated based on the HPP collision rules.
One can represent the collision rules as a series of binary statements. The best example is found in 1 where the authors represent the collision rules as a binary statement. Examples of the same binary statement can be found in other papers, however (need to record them)
$$a = a \otimes [(a \wedge c \wedge \neg (b \vee d)) \vee (b \wedge d \wedge \neg (a \vee c))]$$
Where the logic operator symbols are
In C, the following code implements the above rule:
for (x = 0; x < LATTICE_WIDTH; x++) {
for (y = 0; y < LATTICE_HEIGHT; y++) {
change = (a[x][y] & c[x][y] & ~(b[x][y] | d[x][y])) |
(b[x][y] & d[x][y] & ~(a[x][y] | c[x][y]));
K_a[x][y] = a[x][y] ^ change;
K_b[x][y] = b[x][y] ^ change;
K_c[x][y] = c[x][y] ^ change;
K_d[x][y] = d[x][y] ^ change;
}
}
The boolean expression allows us to perform the computation needed without the use of if-else statements. It should be also noted that we will never go outside the bounds of the array, the same cannot be said about the propagation step. Also note that the expression
(a1[x][y] & c1[x][y] & ~(b1[x][y] | d1[x][y])) |
(b1[x][y] & d1[x][y] & ~(a1[x][y] | c1[x][y]))
Is repeated four times in the binary representation, which is why we store it in a separate value to reduce three computations.
The HPP propagation step is the process of moving velocity vectors in the same direction they are moving in after the collisions are resolved. Because of the way we oriented our grid, we made this step unnecessarily complicated. Also it’s not clear if our representation has any advantages over a regular square grid. Future implementation (if one is needed) would use a regular square grid.
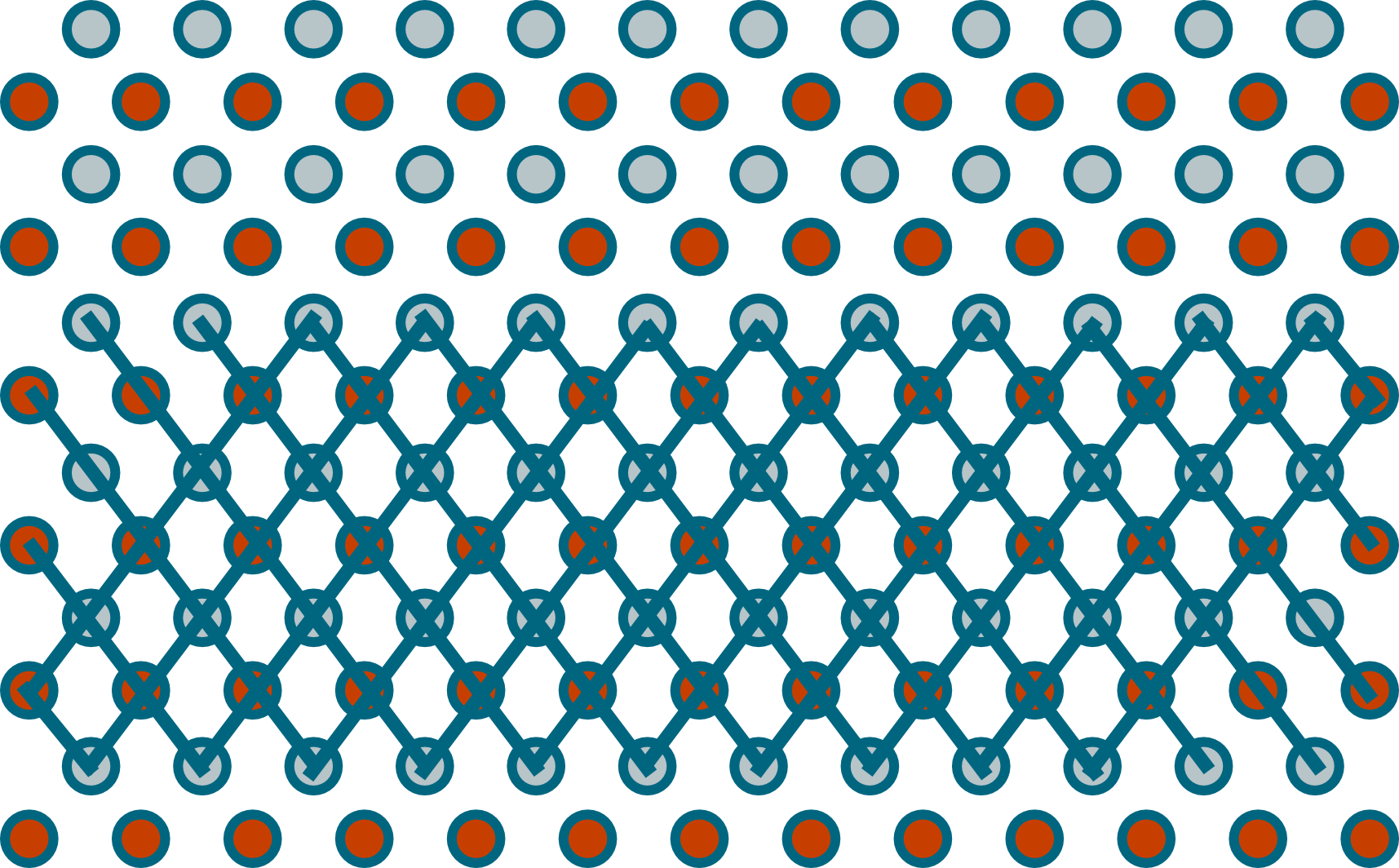
We use the following code to propagation the vectors in the lattice
a[i][j] = K_a[i-1][j-1];
b[i][j] = K_b[i-1][j+1];
c[i][j] = K_c[i+1][j+1];
d[i][j] = K_d[i+1][j-1];
it should be evident that we will run out of bounds if we run the above piece of code over the width of the lattice array. Since we do not want to enforce any boundary conditions at this stage of the process, we place our lattice on a toroidal surface. This can be easily implement in C by noting that the following way to access and store array elements creates the toroidal surface:
t[(i+n + LATTICE_HEIGHT) % LATTICE_HEIGHT][(j+m + LATTICE_WIDTH) % LATTICE_WIDTH]
and will also always be in the bounds of the matrix representation.
Since C has no differentiation between a boolean value and a short, we can overload a short variable to contain multiple vector values. The boolean expression does not change, but as you see from the figure below, the propagation step has to.
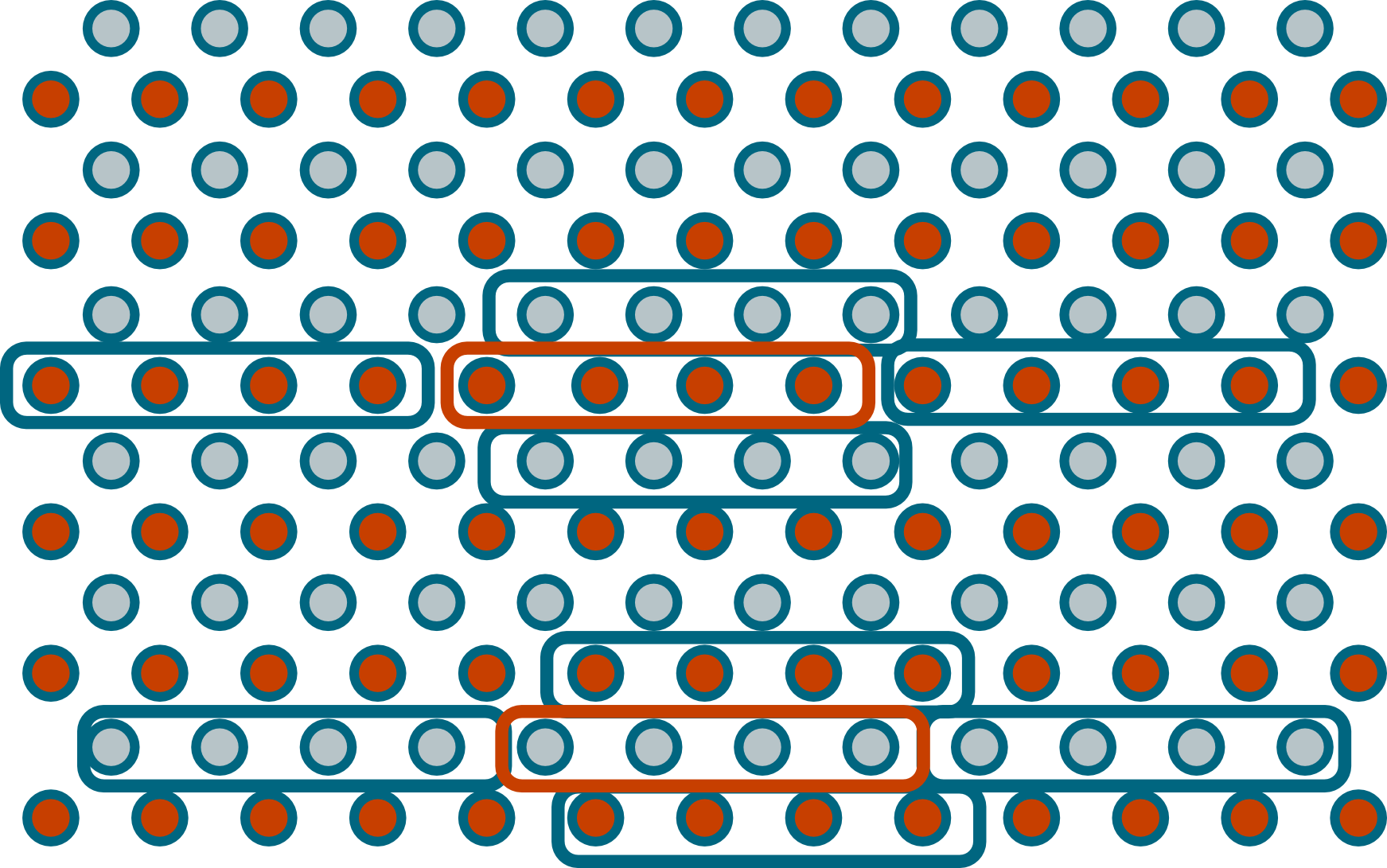
There are a few differences between our implementation and the one described above:
c1, c2, c3, and c4 rather than a, b, c, and d. The temporary collision arrays have also been renamed to k1, k2, k3, and k4.The crux of the code for HPP is provided bellow
int x, y;
short change;
// Resolve Collisions
for (x = 0; x < LATTICE_WIDTH; x++) {
for (y = 0; y < LATTICE_HEIGHT; y++) {
change = (a1[x][y] & c1[x][y] & ~(b1[x][y] | d1[x][y])) |
(b1[x][y] & d1[x][y] & ~(a1[x][y] | c1[x][y]));
a2[x][y] = a1[x][y] ^ change;
b2[x][y] = b1[x][y] ^ change;
c2[x][y] = c1[x][y] ^ change;
d2[x][y] = d1[x][y] ^ change;
}
}
// Propagate
for (x = 1; x < LATTICE_WIDTH - 1; x++) {
for (y = 1; y < LATTICE_HEIGHT - 1; y += 2) {
a1[x][y] = (a2[x][y - 1] >> 1) + (a2[x - 1][y - 1] << LAST);
b1[x][y] = b2[x][y - 1];
c1[x][y] = c2[x][y + 1];
d1[x][y] = (d2[x][y + 1] >> 1) + (d2[x - 1][y + 1] << LAST);
a1[x][y + 1] = a2[x][y];
b1[x][y + 1] = (b2[x][y] << 1) + (b2[x + 1][y] >> LAST);
c1[x][y + 1] = (c2[x][y + 2] << 1) + (c2[x + 1][y + 2] >> LAST);
d1[x][y + 1] = d2[x - 1][y + 2];
}
}
Never implemented.
In the Face Centered Hyper Cubic model, you have 24 vectors. 16 correspond to the vertexes of the hyper cube while the other 8 correspond to the center of the squares in the hyper cube.
Since you cannot store the entire table, you consider only states that have a normalized momentum. The coordinates of the momentum $q$ are defined by
$$q_\alpha = \sum_{i = 0}^{24} S_i C_{i \alpha}$$
where $S_i$ is a boolean variable signifying the presence or absence of a particle with velocity $C_i$. The momentum is normalized if the coordinates satisfy
$$q_1 > q_2 > q_3 > q_4 > |q_1 - q_2 - q_3|$$
Different isometries are then applied if one of the following conditions are satisfied in the following sequence:
Where