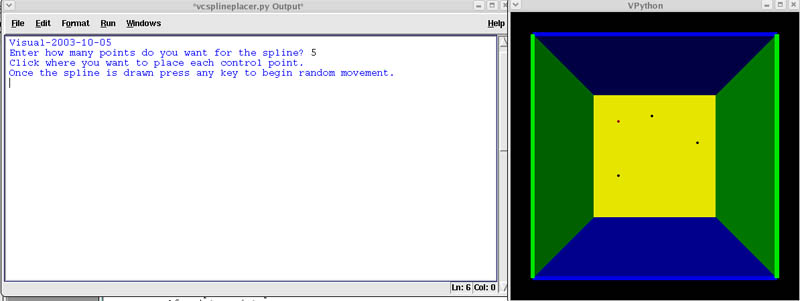
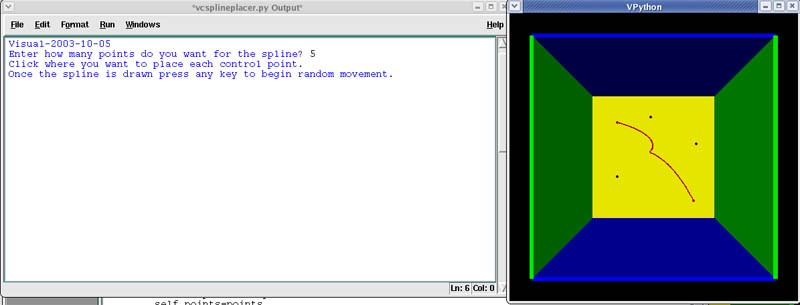
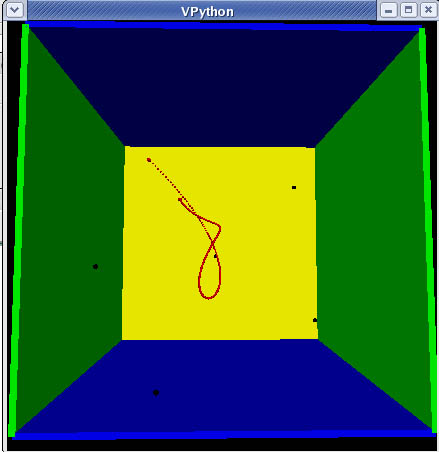
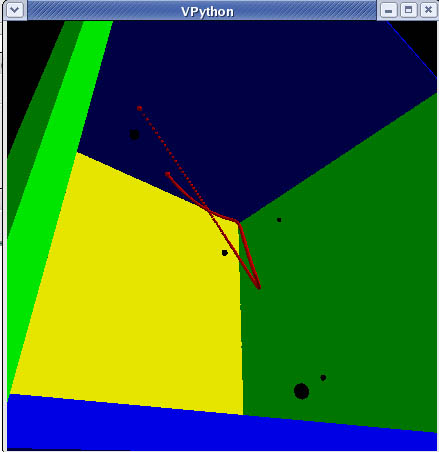
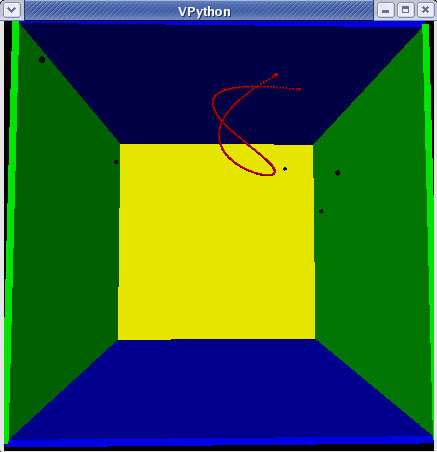
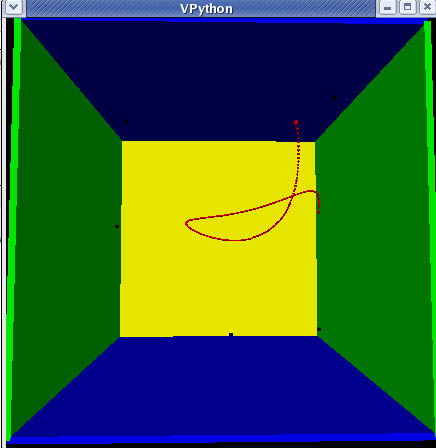
The project is an interactive program written in VPython that allows the user to select the number of control points they wish to place for a Bezier spline and after the end point is laid the spline is drawn between the 1st and last point and its shape governed by the control points. The spline drawn is a basic Bezier Spline. After the spline is drawn a key press will cause all of the points to move with random velocities and bounce around the box that they are inside. As the points move the spline is redrawn to reflect the new position of the control points.
The foundation of the program comes from the Bounce.py program and its various evolutions most heavily the bounce program in which multiple balls bounce inside a cube. The balls serve as the control points for the Spline Wizard program. The bounce program was modified so that the user selects the number of balls they wish to place (which serve as the control points) and then selects their position by mouseclicks. Random velocities were also added to make the movement more interesting.
The Spline Wizard works at creating the spline and fairly fluid movement for splines with a small number of control points (around 5), however it moves very slowly for larger number of control points due to the many number of calculations that must occur. As I have little programming experience I am sure a much more efficient method of calculating the position of the spheres that make up the spline exists. Also the method of drawing the spline by putting a number of spheres end to end is also a source of the visual discontinuity that occurs when the spline is stretched between many control points. I unfortunately did not have time to fix this problem although I am sure it would be quite a simple task. The VPython program also does not check to make sure the control points are placed inside the box so the user can accidentally place them outside of the box which still works for drawing the spline but causes the spline to extend out of the box in some cases as well as have erratic movement because of the bouncing off the walls of the ball outside of the walls. These among other problems show that the program has some bugs that need to be worked out but the basic concept is shown by the program. I originally wanted to work to be able to draw regular B-splines and eventually NURBS splines and perhaps will be able to accomplish this. I believe I wrote the program in an object orientated way that would help facilitate the switch to the other types of splines by creating methods that calculate the appropriate weights needed for the more complex splines and then add these values to the general position calculation of the balls in the spline.
Many thanks to Professor Francis for helping inspire the project and help along the way, also to the rest of the Math 198 class for helping with various problems.
 where
where